你可以连接你的机器人到了一封电报聊天帐户和聊天你的机器人在移动,或者让你的机器人管理您的电报道。
该报卡可以连接你的机器人 报。

| 性能 | 描述 |
|---|---|
| 连接 | 连接的机器人。 |
| 检查邮件 | 有人检查其电报的消息。 |
| 报机器人 | 你不需要输入此,只要点击连接。 |
| 机器人令牌(从电报) | 你不需要输入此,只要点击连接。 |
| 两者URL | 启用实时信息,然后点击连接以自动发送你两者为电报。 |
| 报机器人性 | 描述 |
|---|---|
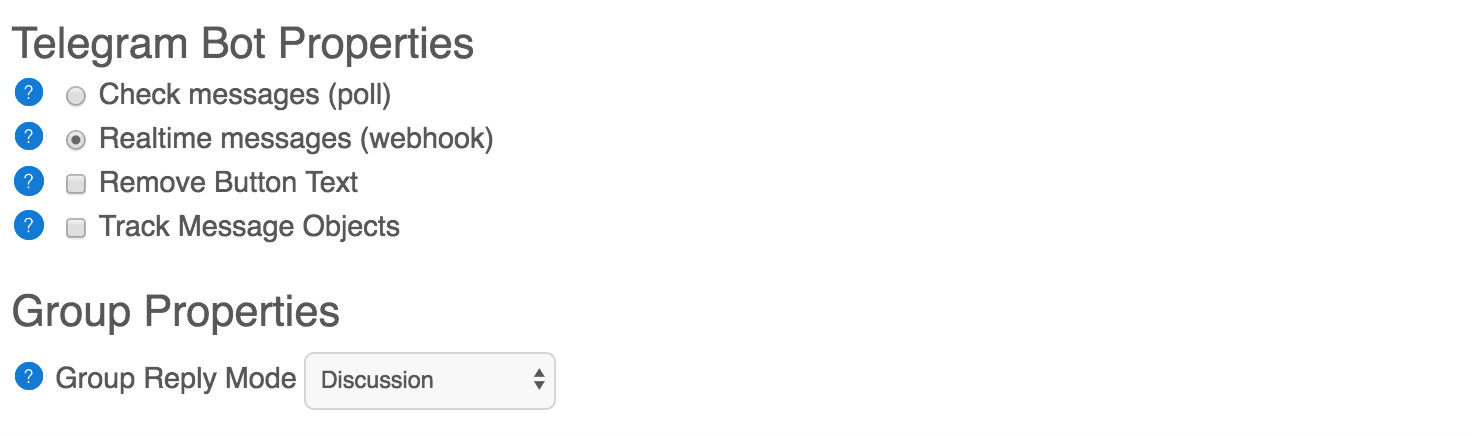
| 检查邮件(调查) | 配置,如果机器人应该投票,为新的信息和答复。 |
| 实时信息(两者) | 配置,如果机器人应当利用两者的回复信息在实时。 |
| 删除的文字 | 配置,如果机器人应该删除的按钮文本的消息。 |
| 追踪信息 | 存储的消息在机器人的输入和对话日志。 |
| 小组答复模式 | 选择人的答复模式(忽略,只听,听,讨论和对话)的小组。 |

| 通道的性质 | 描述 |
|---|---|
| 通道 | 你可以有你的机器人管理一道,员额从RSS,或自动员额。 输入你的名字,并保证你的机器人已经加入作为一个通道管理员。 |
| RSS | 自动后的内容从RSS一个通道。 列出每个饲料分离的新行。 你可以包括前缀和/或后来的追加RSS标题。 |
| RSS关键词 | 只有后RSS,包含一个关键词组在其标题。 关键词必须分开的一个空间(不是一个逗号),每个关键词设定必须以分通过的新路线。 |
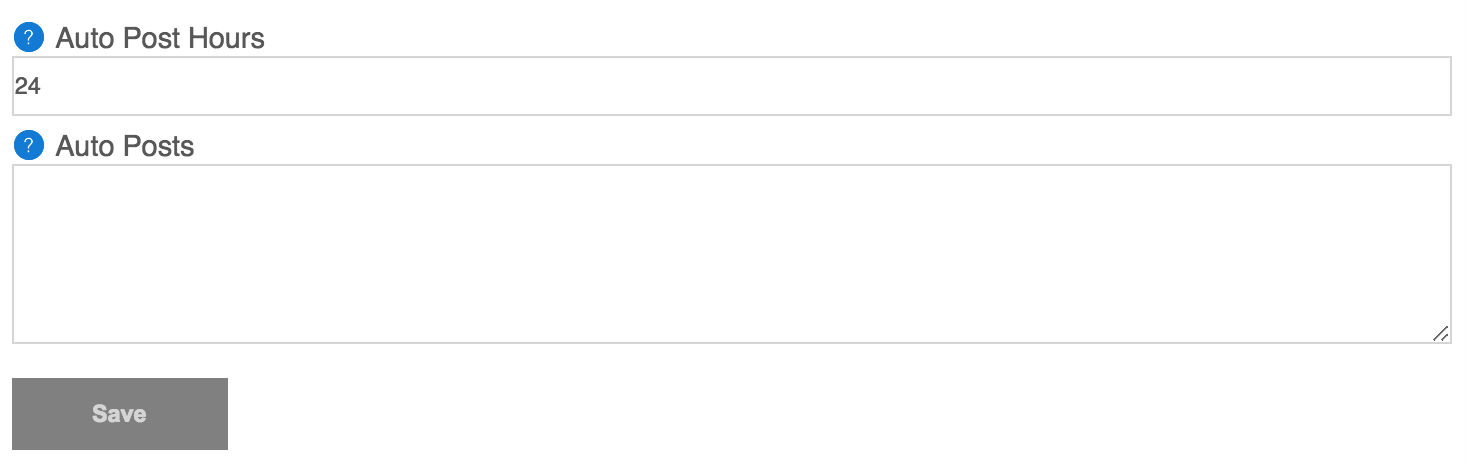
| 汽车后 | 配置,如果机器人应该职位自动设定的小时数。 |
| 汽车后小时 | 数小时的等待之间的自动员额。 |
| 自动员额 | 设置的职位自动员额。 列表中的每个后的分离的新行。 自和AIML模板可以使用。 |













